Э.Я. Фальков — начальник отделения ГосНИИАС, главный конструктор по радиоэлектронным системам
Беспилотные авиационные системы (БАС) находят всё большее применение как в целях решения задач в интересах силовых ведомств, так и для гражданских применений. Следуя общему духу времени в части компьютеризации, роботизации и т.п., можно ожидать, что в скором будущем мы станем свидетелями широкого использования БАС в авиации. Однако перед этим мировому авиационному сообществу будет необходимо решить несколько фундаментальных технических проблем.
Очень часто мы слышим на различных форумах и в печати, что продвижению БАС препятствует отсутствие нормативно- правовой базы, регламентирующей полёты беспилотных воздушных судов (БВС, по определению ИКАО, БАС включает беспилотное воздушное судно (БВС), наземную станцию управления (НСУ), линии передачи данных для наблюдения и управления, средства запуска и приёма БВС.) вместе с другими традиционными пилотируемыми воздушными судами (ВС). В настоящее время широко используемые и отвечающие всем стандартам ИКАО технические средства организации полётов пилотируемой авиации оказываются недостаточными для интеграции БАС в гражданское воздушное пространство. Поэтому нормативно- правовая база для применения БАС может быть написана только после того, как промышленностью будут разработаны, испытаны/верифицированы и сертифицированы технические средства, которые смогут обеспечить безопасную для всех пользователей воздушного пространства эксплуатацию БАС наряду с пилотируемой авиацией.
Каким образом сейчас производится организация полетов БАС?
В соответствии с заявкой пользователям БАС выделяется на определённое время и в определённых размерах воздушное пространство, которое на указанный период Интеграция беспилотных авиационных систем в общее воздушное пространство: ключевые проблемы и возможные пути решения Эдуард Яковлевич Фальков, Начальник отделения — Главный конструктор ГосНИИ Авиационных Систем, Эксперт от Российской Федерации в комитете ИКАО по дистанционно пилотируемым авиационным системам закрывается для других пользователей, в т.ч. для пилотируемой авиации. И вот в таком сегрегированном воздушном пространстве (в силу отсутствия другого законодательства) летают в лучшем случае несколько БВС. Между тем воздушное пространство – это такой же национальный ресурс, как нефть и газ, и оно должно использоваться рачительно, не говоря уже о дискриминационных ограничениях для пилотируемой авиации и связанных этим удобствах для пассажиров. Это поняли во всех странах, и сейчас авиационное сообщество во всём мире усиленно работает над проблемой интеграции БАС в общее (несегрегированное) воздушное пространство. Работы ведутся в т.ч. под эгидой Международной организации гражданской авиации (ИКАО) в лице специального комитета по дистанционно пилотируемым авиационным системам (ДПАС). Поставлена задача разработки международных стандартов, обеспечивающих бесшовные перелёты БВС из одной страны в другую, как это делает пилотируемая авиация. В работе комитета принимают участие представители Российской Федерации. Нельзя сказать, что работа над стандартами в ИКАО идёт с большим успехом. Если раньше датой создания стандартов называли 2020-й год, теперь это уже 2030-й год. При этом в комитете отсутствует единое понимание при рассмотрении многих узловых технических вопросов. Означает ли это, что в Российской Федерации беспилотники полетят в общем воздушном пространстве не ранее 2030-го года? Рассмотрим следующие ключевые проблемы внедрения БАС в общее воздушное пространство (именно эти проблемы в основном тормозят совместные полёты пилотируемых и беспилотных ВС):
Наблюдение БВС;
- Опасность потерять связь БВС с внешним пилотом и с системой УВД; связь должна быть устойчивой к разного рода сбоям;
- Связь в условиях отсутствия прямой радиовидимости между БВС и наземной системой управления (НСУ) и между БВС и системой УВД;
- Предупреждение столкновений ВС в воздухе – т.н. Detect And Avoid (D&A).
Общая позиция ИКАО в части наблюдения любых воздушных судов в наземной системе УВД состоит в использовании следующих методов и средств:
- радиолокационное поле наблюдения на основе вторичных радиолокаторов (ВРЛ) режимов A/C/S;
- поле наблюдения на основе многопозиционных систем наблюдения (МПСН);
- поле на основе спутниковых данных с использованием Автоматического Зависимого Наблюдения радиоВещательного типа (АЗН-В).
БВС должны наблюдаться системой УВД одним из трёх методов, указанных выше, или комбинацией этих методов. Одновременно БВС должно наблюдаться внешним пилотом БАС.
Использование на борту БВС аппаратуры в режиме ответчика ВРЛ влечёт за собой необходимость установки на НСУ вторичного радиолокатора. Обычно НСУ в лучшем случае базируется на малой грузовой машине-фургоне или наблюдение/управление БВС производится с помощью носимой внешним пилотом аппаратуры. Ни по размерам/потребляемой мощности и другим техническим параметрам, ни по стоимости вторичная радиолокация для БАС с позиции НСУ использована быть не может.
Мобильная НСУ также исключает возможность использования МПСН, представляющей совокупность синхронизированных по времени разнесённых на значительное расстояние (15-20 км и более) приёмников радиоизлучения.
Таким образом, с позиции НСУ единственно приемлемым методом наблюдения БВС является АЗН-В. Использование на борту БВС функций ответчика ВРЛ и передатчика МПСН, не используемых внешним пилотом, в условиях бортовых ограничений по массе, энергопотреблению и др. непродуктивно.
АЗН-В представляет собой безрадарный метод наблюдения ВС, при котором ВС автономно, например, при помощи средств спутниковой навигации ГЛОНАСС/GPS, определяет свое местоположение и в соответствии с протоколом, зависящим от типа выбранной линии передачи данных (ЛПД), сообщает в радиовещательном режиме о своем положении всем заинтересованным участникам воздушного движения и иным пользователям. АЗН-В с высокой точностью обеспечивает наблюдение ВС без использования наземных радаров при существенно меньших затратах. Использование услуг АЗН-В обычно сопровождается предоставлением других аэронавигационных услуг (примыкающих применений), реализуемых с помощью той же ЛПД, с помощью которой осуществляется предоставление услуг АЗН-В.
В соответствии с утвержденной Минтрансом России программой «Внедрение средств вещательного автоматического зависимого наблюдения (2011 — 2020 годы)» в России приняты для использования два типа ЛПД в интересах различных пользователей:
- 1090 ES «расширенный сквиттер» — для пользователей верхнего воздушного пространства (пассажирские и грузовые лайнеры);
- УКВ ЛПД режима 4 (VDL-4) — для пользователей нижнего воздушного пространства, включая авиацию общего назначения (АОН), вертолёты и беспилотную авиацию.
Принятие двухрежимного АЗН-В объясняется в первую очередь желанием российских авиакомпаний и Росавиации использовать установленную на всех воздушных судах импортного производства аппаратуру 1090 ES и вместе с тем её недостатками при использовании во всём воздушном пространстве; аналогичная двухрежимная схема принята в США с использованием двух ЛПД – 1090 ES и приёмопередатчиков универсального доступа UAT. (UAT является региональным решением, использует для наблюдения частоту, глобально отведённую ИКАО для навигации. Евроконтроль информировал Росавиацию, что UAT никогда не будет использоваться в Европе; Россия входит в европейскую зону ИКАО). АЗН-В на базе VDL-4 прекрасно работает и в верхнем воздушном пространстве, что было неоднократно демонстрировано в полётах авиации ВВС России и в международных полётах с участием российских ВС.
Применительно к совместным полётам пилотируемых и беспилотных ВС в Российской Федерации укажем на следующие результаты.
В [1] описаны совместные полеты трех пилотируемых и двух беспилотных ВС в общем воздушном пространстве, которые проходили в присутствии членов группы UASSG ИКАО по беспилотным авиационным системам во время 7-ой встречи UASSG в Санкт-Петербурге в 2011 году. Взлетная массы участвовавших ВС находились в диапазоне от 5 кг до 12 т. Применявшаяся в полетах ЛПД, основанная на УКВ ЛПД режима 4 и отвечающая стандартам ИКАО, EUROCAE и ETSI, обеспечивает режим вещания для выполнения функций АЗН-В-Out, АЗН-В-In, TIS-B, FIS-B, A-SMGCS и обеспечения ситуационной осведомленности пилотируемых и беспилотных ВС, а также сквозную связь «точка — точка», которая может служить как дублирующая линия связи для управления ДПАС (командная радиолиния).
Имевшая место случайная потеря наблюдения БВС внешним пилотом БАС оказала несущественное влияние, поскольку внешний пилот мог получать информацию о своем ДПВС через систему УВД, так что здесь мы увидели элементы робастности связи (элементы интернета в небе). Эшелонирование всех ВС и уклонение от столкновений между ними и с наземными движущимися объектами обеспечивались ситуационной осведомленностью всех пилотов под руководством авиадиспетчера.
В [2] описано взаимодействие пилотируемого ВС «Jabiru- 450» АОН и ДПАС «Птеро», оснащенного небольшим (300 г) приемопередатчиком. Было продемонстрировано полное информационное взаимодействие в режимах «борт-земля» и «борт-борт» между пилотами и наземными станциями управления.
В [3] показана возможность применения ДПАС в поисково-спасательных действиях. Использовались ДПАС самолетного и вертолетного типа. В работе принимала участие компания «Паллада» — официальная организация, работающая в системе организации и проведения поисково- спасательных работ под эгидой Росавиации. Результаты полётов подтвердили эффективность прикладных технических решений для организации поисково-спасательных работ помощью ДПАС.
В [4] продолжена линия поисково-спасательных работ с применением ДПАС под непосредственным управлением Росавиации. В полетах участвовали пилотируемый самолет (Ан-2) с десантниками и различные беспилотные ВС. Рассматривались поиск при имитации крушения ВС, доставка средств медицинской помощи в район имитируемого крушения с помощью ДПАС, организация взаимодействия всех участников демонстрационных полетов на всех этапах проведения операции. В результате выполненных полетов Росавиация приняла решение об официальном привлечении ДПАС к поисково-спасательным работам при необходимой организации взаимодействия пилотируемых и беспилотных ВС на базе продемонстрированных технологий.
В [5] рассмотрено взаимодействие ДПАС самолетного и вертолетного типа с наземными стационарными и подвижными объектами в интересах Газпрома на предмет выявления незаконной деятельности на территории, прилегающей к газопроводам. Было продемонстрировано взаимодействий ДПАС с различными наземными подвижными объектами в охранной зоне инфраструктуры Газпрома.
Наряду с организацией совместных полетов пилотируемых и беспилотных ВС большое внимание уделялось организации полетов, пилотируемых ВС и созданию наземной инфраструктуры УВД на базе применения УКВ ЛПД режима 4 [6-10]; были показаны значительные преимущества применений на базе АЗН-В с обеспечением ситуационной осведомленности и смежных функций FIS-B, DGNSS, AOC и пр. В частности, [8] описывает совместные полеты в интересах Государственной таможенной службы; наряду с ВС к ведению наблюдения были привлечены морские суда и наземный транспорт. Было продемонстрировано, что прикладная система связи предоставляет полное взаимное наблюдение для всех видов транс порта, а также необходимое взаимодействие воздушных, морских и наземных транспортных средств как друг с другом, так и со станциями наземного наблюдения ВС.
[10] описывает применение небольших (300 г) ручных приемопередатчиков у десантников при приземлении, что позволило проследить весь путь парашютиста до места приземления, оценивая условия ветра, чтобы внести коррективы при последующей выброске десанта в район противодействия противника. Вполне целесообразно применять такие же приемопередатчики на ДПАС.
Совместные демонстрационные полеты пилотируемых и беспилотных ВС в несегрегированном воздушном пространстве на базе УКВ ЛПД режима 4, выполненные в Российской Федерации в 2011-2015 гг. для различных функциональных заказчиков, показали следующие результаты:
- Применение АЗН-В позволяет УВД надежно отслеживать оборудованные ВС (пилотируемые и беспилотные) с последующим эшелонированием и предупреждением столкновений DAA наземного базирования.
- Ситуационная осведомленность внешних пилотов обеспечивается либо напрямую посредством АЗН-В от ВС, оснащенных приемопередатчиками АЗН-В, либо посредством TIS-B от неоснащенных ВС, наблюдение за которыми ведется средствами, принятыми в данном воздушном пространстве; ситуационная осведомленность наряду с DAA наземного базирования обеспечивает безопасные полеты для всех пользователей воздушного пространства.
- Полеты ДПАС организует модуль данных УВД ДПАС; каждым ДПВС внутри модуля управляет соответствующая НСУ; НСУ и УВД узнают положение ДПВС с помощью соответствующих данных АЗН-В.
- Независимо от применяемой модулем ДПАС ЛПД, не оказывается никакого влияния на организацию полетов, пилотируемых ВС, которые выполняются в соответствии с правилами, существующими для данного воздушного пространства.
- Предоставляются услуги не только наблюдения (АЗН-В- Out, АЗН-В-In, TIS-B, A-SMGCS, поисково-спасательные действия), но и навигации (DGNSS), а также некоторые функции FIS-B (оперативная доставка всем пилотам информации о погоде, навигационной информации, цифровых NOTAM), CPDLC, AOC и пр.
- Использовался только определённый ИКАО авиационный УКВ спектр; оборудование УКВ ЛПД режима 4, применявшееся во всех полетах, было создано в полном соответствии со стандартами ИКАО (Annex 10 Vol 3 и Doc 9816), EUROCAE (ED 108A) и рядом технических спецификаций и европейских нормативов (EN 301842 и EN 302842), разработанных ETSI.
В целом можно сказать, что были продемонстрированы работоспособные технологии интеграции ДПАС в гражданское воздушное пространство на базе существующих международных стандартов. Применяемый метод в режиме прямой радиовидимости RLOS характеризуется прямой голосовой связью между ДПВС и УВД и применением модуля ДПАС для обмена данными между ДПВС, НСУ и УВД. Независимо от применения УКВ ЛПД режима 4 в модуле ДПАС для любого существующего контролируемого воздушного пространства использование предложенного модуля ДПАС не оказывает какого-либо воздействия на организацию полетов пилотируемых воздушных судов. Следует констатировать, что российская авиационная промышленность значительно опережает западные страны в части технологий интеграции беспилотных авиационных систем в контролируемое воздушное пространство.
Вместе с тем в последнее время в Министерстве транс порта России стала обсуждаться идея использования некого «единого стандарта для реализации АЗН-В» с последующей якобы экономией средств.
Между тем в соответствии с разъяснениями из ИКАО, единого стандарта ИКАО на АЗН-В не существует в принципе. Несмотря на самое пристрастное отношение к ЛПД 1090 ES на ее родине – США, США в программе NextGen предусматривают реализацию АЗН-В на базе двух ЛПД — 1090 ES для магистральных самолетов и преимущественно UAT для авиации общего назначения (АОН), причём обязательной с 2020 г. для ЛПД 1090 ES будет лишь функция посылки сообщения воздушным судном АЗН-В-Out и его приёма в системе УВД. Одна из основных причин указанного подхода заключается в явлении т.н. насыщения/интерференции, когда при высокой плотности воздушного движения сообщения АЗН-В накладываются друг на друга (отметим, что на этой же частоте 1090 МГц функционируют наземные и бортовые приемопередатчики вторичной радиолокации и бортовые системы предупреждения столкновений TCAS). Попытки отечественных сторонников 1090 ES апеллировать к более низкой в среднем по сравнению с США плотностью воздушного движения в России не состоятельны, поскольку в зонах крупных воздушных узлов интенсивность воздушного движения в России сопоставима с аналогичным показателем для мировой авиации.
В АЗН-В нуждается не только гражданская, но и государственная авиация. В соответствии с поручениями руководства Правительства России предусмотрена реализация АЗН-В в интересах государственной авиации в целях решения задач наблюдения и управления воздушными судами различного назначения, повышения безопасности полетов и эффективности выполнения специальных задач, создания системы управления полетами пилотируемой и беспилотной авиации в едином воздушном пространстве.
При принятии решения о внедрении технологии АЗН-В в интересах государственной военной авиации и государственной авиации специального назначения необходимо учитывать ряд следующих особенностей ЛПД 1090 ES.
- «Прозрачность» и доступность данных наблюдения для несанкционированных пользователей.
В настоящее время с помощью организованного сообщества радиолюбителей через сайт flightradar24.com осуществляется наблюдение за полетами в Российской Федерации всех воздушных судов, оборудованных аппаратурой 1090 ES, в результате приема открытых сигналов от воздушных судов (ВС) в зоне прямой радиовидимости и отсылки полученной информации на указанный сайт. В 2018 г. вводится в эксплуатацию группировка спутников Iridium 2-го поколения, оснащенных каналом приема сигналов 1090 ES. АЗН-В сообщения будут поступать на указанные спутники, после чего через сеть спутников будут поступать на наземную станцию приема, расположенную в США. Тем самым заинтересованными службами будет осуществляться глобальное слежение за всеми ВС, оборудованными АЗН-В 1090 ES.
- Информационная незащищенность.
Как подтвердили исследования ведущих западных организаций по связи, АЗН-В на базе 1090 ES абсолютно беззащитно с информационной точки зрения. При помощи несложного технического оборудования все желающие, в т. ч. террористы, могут посылать ложные сообщения АЗН-В о вымышленном положении ВС («фантомов») любых типов рейсов в воздушном пространстве. При этом в рамках АЗН-В на базе 1090 ES не существует аппаратно-программных средств, способных отсеять ложные сигналы от истинных. В 2016 г. появились рабочие документы ИКАО, подтверждающие незащищенность ЛПД 1090 ES от киберугроз. Для возможности использования информации АЗН-В на базе 1090 ES по ИКАО должна осуществляться обязательная постоянная верификация данных о положении ВС с применением методов вторичной радиолокации или мультилатерации.
Остановимся на вопросе незащищённости ЛПД 1090 ES от киберугроз более подробно.
Как в любом АЗН-В, на борту ВС формируется сообщение АЗН-В-Out, куда входят, в частности, идентификатор/позывной ВС, координаты и скорость ВС. После этого это сообщение передается в эфир с помощью ЛПД 1090 ES, протокол которой описан в стандартах ИКАО. При этом ничто не мешает сторонним пользователям в любой момент времени посылать похожие вымышленные сообщения с произвольными координатами, которые никоим образом формально нельзя отличить от истинных в рамках АЗН-В 1090 ES. Не ставится под сомнение истинность реальных сообщений АЗН-В, но к ним в произвольном количестве могут быть добавлены неконтролируемые, похожие по виду сообщения.
В качестве примера применительно к вопросу о кибербезопасности ЛПД 1090 ES 9 июня 2016 г. в пос. Ропша в 25 км. от аэропорта «Пулково» бригада сотрудников ФГУП «ГосНИИАС» провела следующий эксперимент.
С помощью мобильной версии, сертифицированной наземной приёмной станции «Сонар» с использованием ЛПД 1090 ES оценивалась воздушная обстановка в районе а/п «Пулково». Обработанные сигналы АЗН-В отображались на дисплее диспетчера УВД и регистрировались на накопителе на твёрдом диске.
На начало эксперимента в воздухе находились 12 самолетов (см. рис. 1). Аналогичную картину можно было наблюдать на сайте flightradar24.com.
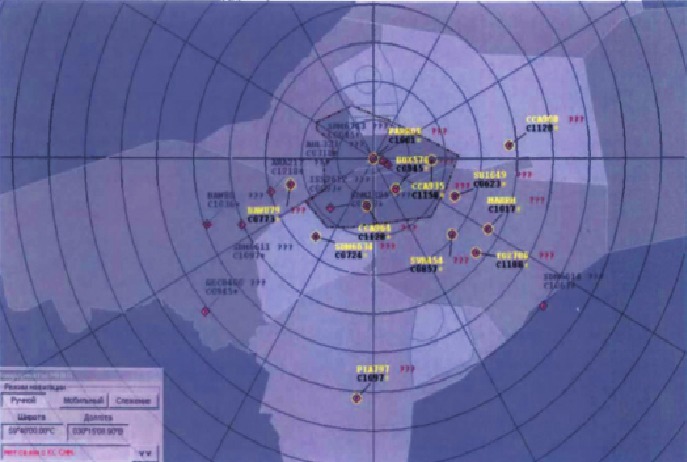
Рис.1 Воздушная обстановка без спуфинга
Далее на вход УКВ антенны, указанной профессиональной наземной приемной станции, было организовано поступление сигналов, имитирующих полетные АЗН-В данные от «фантомов» — не существующих в реальности ВС, АЗН-В данные от которых удовлетворяют требованиям RTCA DO-260B; реальные воздушные суда посылают данные АЗН-В по этим требованиям. Подача сигналов от фантомов (спуфинг) была организована таким образом, чтобы гарантированно не оказывать влияния на систему УВД и ее пользователей; дальность действия помех не превышала 50 м. Отметим, что устройство имитации сигналов 1090 ES выполнено в виде компактного блока с использованием покупных легкодоступных элементов. Дисплей диспетчера УВД с данными спуфинга показан на рис. 2.
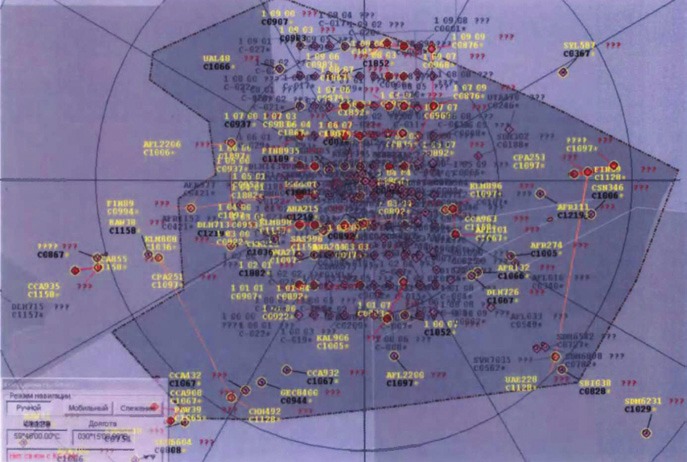
Рис.2 Воздушная обстановка при наличии спуфинга
По оценкам диспетчеров УВД, приведенные данные, свидетельствуют о полном коллапсе наземной системы наблюдения с использованием данных АЗН-В на базе 1090 ES.
Помимо указанного выше могут использоваться следующие менее очевидные и более изощрённые методы кибератак.
Указанный эксперимент подтвердил необходимость обязательного использования данных вторичной радиолокации или мультилатерации для верификации данных АЗН-В на базе ЛПД 1090 ES в системе УВД, что указано в документе ИКАО верхнего уровня по авиационному наблюдению Doc 9924, а также в документах 2016 г. ASWG TSG WP02-27, SP-ASWG/3 WP-24. Но в этом случае в силу высоких затрат на ВРЛ и МПСН такое АЗН-В с экономической точки становится малоэффективным, а с технической точки зрения — попросту не нужным, поскольку для определения место- положения воздушного судна в системе УВД методы ВРЛ или МПСН являются самодостаточными, и никакое АЗН-В при этом не требуется. Что касается верификации данных наблюдений борт-борт, по ИКАО возможность их верификации для АЗН-В на базе 1090 ES возможна только на базе бортовой системы предупреждения столкновений TCAS в пределах соответственно ограниченной дальности. Между тем именно наблюдения борт-борт представляют наибольший интерес для авиации общего назначения, вертолетов, беспилотных воздушных судов, которые не оборудованы системами TCAS, летают на небольших высотах и для которых обслуживание воздушных судов при помощи наземных систем УВД представляется проблематичным, а с практической точки зрения — не совсем востребованным, тем более с экономической точки зрения — разворачивание полноценной системы УВД в обширных регионах, где выполняются несколько полетов ВС АОН или вертолетов в неделю никогда не окупится. В таких районах, как и в случае истринской катастрофы, первоочередным является применение АЗН-В-In без участия системы УВД. Но если данные наблюдения ВС в системе УВД по АЗН-В-Out 1090 ES могут быть верифицированы данными ВРЛ или МПСН, то данные наблюдений борт-борт в рамках АЗН-В 1090 ES без участия систем TCAS в принципе не могут быть верифицированы, что подтверждается позицией комитета SP ИКАО по наблюдению.
Таким образом, развертывание АЗН-В 1090 ES потребует сохранения и дополнительного развития наземной инфраструктуры вторичной радиолокации или мультилатерации для частичного решения вопросов кибербезопасности (но тогда теряется главный смысл введения АЗН-В). Невольно встает вопрос: для чего нужно АЗН-В 1090 ES, если оно опирается на ВРЛ или МПСН, которые и без АЗН-В безукоризненно и кибербезопасно справляются с задачей определения местоположения воздушного судна в наземной системе УВД? В своё время АЗН-В задумывалось, чтобы заменить ВРЛ, поскольку оно намного дешевле, точнее, более экологично. Теперь выясняется, что без поддержки ВРЛ или мультилатерации АЗН-В 1090 ES самостоятельно жить не может. Как так случилось, почему оборудовано большое количество самолётов? Представляется, что со стороны производителей зарубежной авиационной техники это либо колоссальная ошибка, когда до появления проблемы кибербезопасности во весь рост об этом всерьёз не думали и оборудовали аппаратурой 1090 ES десятки тысяч ВС Airbus и Boeing, либо что-то ещё, если об этом знали заранее, но продолжали бизнес установки ненужной по существу аппаратуры. То, что сейчас система предотвращения столкновений ТСAS работает по гибридной схеме — на первой стадии АЗН-В, на второй стадии — чисто TCAS — не аргумент. Система может работать чисто как TCAS, без всякого АЗН-В, к тому же, как было показано выше, данным бортовых наблюдений АЗН-В-Out от других самолётов безоговорочно верить нельзя в силу спуфинга, который может быть легко организован с помощью специально запущенных БВС.
Перейдем к вопросу, каким образом решается проблема кибербезопасности при использовании VDL-4.
Какой-то получатель, будь то система УВД или борт, принимает сообщение АЗН-В от отправителя, где указаны координаты отправителя. Зная свои координаты, получатель вычисляет расстояние между отправителем и получателем. Одновременно используется фундаментальное свойство VDL-4, определенное в стандарте ИКАО — временная привязка сообщений. Отправитель, посылая сообщение, вставляет в состав сообщения определенное с высокой точностью время отправки. Получатель также привязывает время получения к временной шкале. Вычислив разность времен прихода и отправления сообщения и умножив его на скорость распространения электромагнитных волн (скорость света), получатель вычисляет фактически измеренное им расстояние между отправителем и получателем. Если расстояния между отправителем и получателем, вычисленные разными методами, с приемлемой точностью, на уровне 1-2%, совпадают, отправитель благонадежен. Если не совпадают, получатель делает определенные выводы и информирует окружающих пользователей о неблагонадежности данного отправителя.
Описанная верификация сообщений справедлива как для случая наблюдения борт-земля, так и для случая борт-борт. Верификация данных осуществляется в рамках самого АЗН-В на базе VDL-4 и не требует ни данных BPЛ, ни данных МПСН.
Необходимо также отметить, что в противоположность ЛПД 1090 ES, которая выполняет только одну главную функцию наблюдения, ЛПД VDL-4 реализует также целый набор других функций, для выполнения которых на воздушных суднах и в системе УВД потребуется использование не менее трех дополнительных ЛПД (см. Таблицу).
Таблица. Реализация связных функций на воздушных судах гражданской авиации
| Функции | ЛПД вар. 1090 ES | ЛПД вар. VDL-4 |
|---|---|---|
| Наблюдение радиовещательное АЗН-В Out | 1090 ES | VDL-4 |
| Наблюдение радиовещательное АЗН-В In (в программах NextGen и в SESAR не предусмотрено) | 1090 ES | VDL-4 |
| Радиовещательное TIS-B (в России наземной станции TIS-B нет) | 1090 ES | VDL-4 |
| Связь пилот-диспетчер, контрактное АЗН, связь с авиакомпанией (полный конфуз с VDL-2 в Европе, планы внедрения существенно отложены) | VDL-2 | VDL-4 |
| DGNSS: целостность + диф. поправки | VDB | VDL-4 |
| Движение по поверхности A-SMGCS | AeroMax | VDL-4 |
| Поиск и спасание | 1090 ES | VDL-4 |
| Радиовещательное полетно- информационное обслуживание FIS-B | 1090 ES Нет | VDL-4 Да |
| Обеспечение кибербезопасности | 1090 ES Нет | VDL-4 Да |
Решив сегодня вопрос с наблюдением в пользу 1090 ES, завтра мы будем вынуждены устанавливать на ВС и в системе УВД другие дополнительные ЛПД. Поскольку VDL-4 может работать одновременно сразу на нескольких частотах, все функции выполняются в рамках одного блока весом не более 100г на полностью российской элементной базе (проблема импортозамещения решена).
Необходимо отметить еще одно очень важное обстоятельство. Принятие 1090 ES и прекращение работ с VDL-4 фактически закрывает АЗН-В и примыкающие применения (предоставление пилотам данных о погоде и аэронавигационных ограничениях в реальном времени, предоставление данных о целостности и дифференциальных поправок для целей навигации, взаимодействие пилота и диспетчера в режиме точка-точка, связь с авиакомпанией или штабом и др.) для государственной авиации. То, что в настоящее время один из российских производителей заканчивает разработку бортовой аппаратуры для вертолетов в интересах ВКС, следует считать недоразумением в силу указанной выше доступности сигнала службам слежения заинтересованных государств с 2018 г. ЛПД 1090 ES реализует лишь одну функцию – наблюдение. В случае какой-либо модернизации будет иметь место постоянная технологическая зависимость как в части идеологических решений, так и по элементной базе. Сервис по полетно-информационному обслуживанию (FIS-B — передача оперативной погоды, аэронавигационной информации и другой служебной информации) в соответствии с концепцией FAA невозможен. Для получения сигналов целостности и дифференциальных поправок при использовании спутниковой навигации должна быть задействована ЛПД VDB, при организации движения по поверхности аэродрома предполагается использование ЛПД Aeromax. Для цифровой связи пилот – диспетчер и ВС – авиакомпания предполагается использование ЛПД VDL-2, испытания которой в Европе показали исключительно плохие результаты и планы внедрения которой существенно сдвинулись. Потребность в дополнительных к 1090 ES ЛПД показана в Таблице; там же показано, что все упомянутые функции реализуются с помощью единственной ЛПД VDL-4, что приводит к существенному уменьшению номенклатуры бортового и наземного оборудования и соответственно стоимости аэронавигационных услуг.
Технология АЗН-В VDL-4 строится на российской элементной базе, обеспечивает реализацию широкого круга применений, имеет значительный потенциал расширения функциональных возможностей и при внедрении уже разработанных ФГУП «ГосНИИАС» специальных процедур закрытия информации может быть применена для выполнения задач в интересах авиации силовых ведомств. Использование АЗН-В VDL-4 в государственной авиации не потребует создания специальной наземной инфраструктуры за счет средств Минобороны России, наземные базовые станции АЗН-В VDL-4 обеспечат возможность специального применения с использованием методов криптозащиты. В рамках реализации пилотного проекта «Ямал АЗН», предусмотренного Программой внедрения АЗН-В в Российской Федерации, в настоящее время завершается опытная эксплуатация АЗН-В VDL-4 в Арктическом регионе с участием вертолетов Ми-8 авиакомпаний «Газпромавиа» и «ЮТэйр», а также вертолетов Ми-8 авиации специального назначения, оснащенных оборудованием АЗН-В VDL-4. Росавиацией одобрено и поддержано применение техно- логий АЗН-В VDL-4 для обеспечения взаимодействия сил и средств в районе проведения поисково-спасательных работ при одновременных полетах беспилотных и пилотируемых воздушных судов. Перспективным направлением развития технологии АЗН-В VDL-4 является организация самоорганизующейся воздушной сети (СОВС) на ЛПД VDL-4. Решением 12-й Аэронавигационной конференции и 38-й Ассамблеи ИКАО признала целесообразность предложенного делегацией Российской Федерации технического решения. Помимо робастности функционирования и обеспечения наблюдения в условиях отсутствия прямой радиовидимости между ВС и наземной станцией, поддерживаемой через сеть находящихся в воздухе ВС, СОВС радикальным образом решает вопросы авиационной безопасности. Система ключей обеспечивает полную аутентификацию радиосообщений, невозможность их перехвата, фальсификации, повреждения и др. Указанная технология может быть применена к выполнению специальных задач в интересах силовых ведомств. Применительно к гражданской авиации СОВС полностью решает задачи обеспечения кибербезопасности. Показано, что СОВС реализуется на базе VDL-4; в то же время в силу случайного доступа реализация сети на базе 1090 ES не представляется возможным. Члены российской делегации разработали, а комитет ИКАО по ДПАС принял к последующему оформлению стандарты по предложенной сети и стандарты обеспечения кибербезопасности. Предложенные механизмы обеспечения кибербезопасности на базе VDL-4 после установки соответствующих приёмопередатчиков будут функционировать не только для беспилотной, но и для пилотируемой авиации. Закрывать нужно не только данные по наблюдению (позывной + координаты), но также множество других видов информации, в т. ч. служебной информации при выполнении специальных операций ВС государственной авиации. Одно из основных назначений сети — полное обеспечение кибербезопасности за счет использования двухключевой системы криптографирования. При этом организацию информационного обмена предлагается осуществлять с помощью унифицированного оборудования гражданского назначения, защита информации при выполнении специальных задач достигается применением двухключевой системы криптографирования.
ВЫВОДЫ
Российская промышленность обладает технологиями на базе существующих международных стандартов ИКАО, EUROCAE, ETSI с необходимым импортозамещением, позволяющими выполнение совместных полётов, пилотируемых и беспилотных воздушных судов в контролируемом воздушном пространстве, что было продемонстрировано в многочисленных демонстрационных полётах. Представляется необходимым закрепить использование указанных технологий в нормативно-правовой базе по производству полётов БАС и организовать серийный выпуск соответствующей аппаратуры.
Дальнейшим развитием указанных технологий обеспечения интеграции БАС в контролируемой воздушное пространство должно явиться использование самоорганизующихся воздушных сетей с обеспечением в том числе необходимой кибербезопасности полётов.
Литература:
- The first in the world joint flights of manned and unmanned aircraft in non-segregated airspace. St.-Petersburg, May 23-25, 2011., https://cybersecuredadsb.ru/upload/UAS_Flights_in_Siversky.pdf
- Experimental Studies on the Definition of ADS-B Mode 4 Characteristics on PTERO UAS and Jabiru-450 GA Piloted Aircraft. Lytkino (Kaluga region) landing site, June 16-17, 2014., https://cybersecuredadsb.ru/upload/GA_and_RPAS_flights.pdf
- Flight Experiment on the Interaction of Piloted and Unmanned Fixed-Wing Aircraft and Rotorcraft for Aviation Search-and-Rescue Tasks Alferyevo air base of MAI, October 13-16, 2014., https://cybersecuredadsb.ru/upload/RPAS_for_SR.pdf
- Scientific and Technical Conference. Application of unmanned aircraft systems for the execution of aerospace Search-and-Rescue tasks (Moscow, Rosaviatsia, Alferyevo airdrome, June 2-4, 2015)., https://cybersecuredadsb.ru/upload/RPAS_under_the_aegis_of_Rosaviatsia.pdf
- Management of Interaction of Unmanned Aircraft Systems of Fixed-Wing and Rotorcraft Type, and Ground Vehicles in the Solution of Tasks for Gasprom JSC Benefit. Pereslavl-Zalessky, November 19-20, 2014., https://cybersecuredadsb.ru/upload/Flights_for_Gasprom.pdf
- Experimental Flights of Utair Mi-8T leading helicopters equipped with ADS-B Mode 4 system for ADS-B service evaluation on routes in Yamal peninsula., https://cybersecuredadsb.ru/upload/Manned_Flights_in_Yamal.pdf
- Joint Ground and Airborne Tests of Mi-8MTB-1 Helicopters with an On-Board ADS-B Complex. January 26, 2013 – February 01, 2013 Nadym., https://cybersecuredadsb.ru/upload/Manned_Flights_in_Yamal.pdf
- ADS-B Technology Application for the Solution of Operational Tasks in Favor of Federal Customs Service (FCS). Flight and Methodical Meetings of FCS Aviation Key Personnel. 11-12 October, 2013 Pscov., https://cybersecuredadsb.ru/upload/Manned_Flights_for_Federal_Custom_Service.pdf
- Manned Flights for Moscow pilot project. April 23 — May 22, 2015., https://cybersecuredadsb.ru/upload/Manned_Flights_for_Moscow_pilot_project.pdf
- Results of the exploratory check of the possibility to apply hardware/software of the automatic dependent surveillance – broadcast (VDL-4) for the benefit of military and transport aviation. Tver airdrome (Migalovo). 26-31 of October, 2015., https://cybersecuredadsb.ru/upload/Manned_IL-76_and_airborne_troops.pdf
Оригинал статьи размещен в журнале «Крылья Родины» 6.2016